SDU:Courses:RSD 2014
This page will contain documentation related to the mobile robot part of the course Robot Systems Design (RSD) at the University of Southern Denmark. More info will follow very soon. Kjeld
Documentation overview
- RSD lectures in mobile robotics
- FroboMind software platform
- Mobile robot (FrobitPro)
- MarkerLocator positioning system
Lectures
Flipped Classroom tutorial videos

Week 38
Mandatory exercises before the lecture:
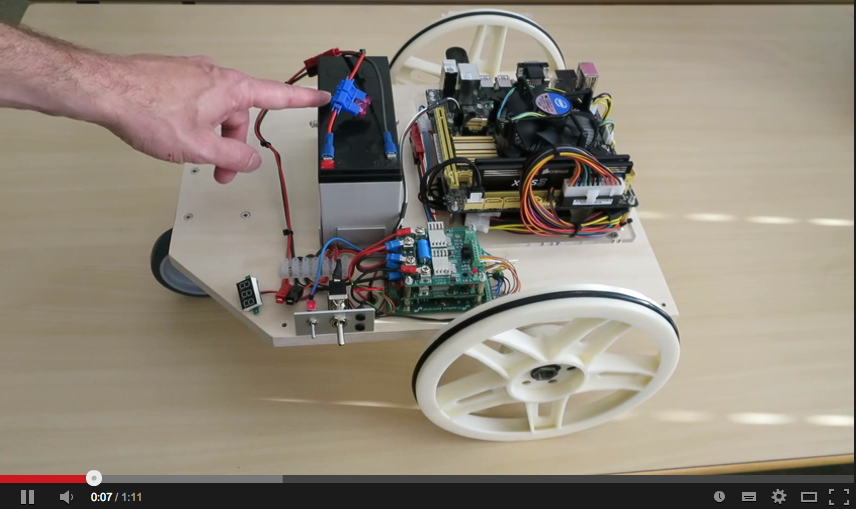
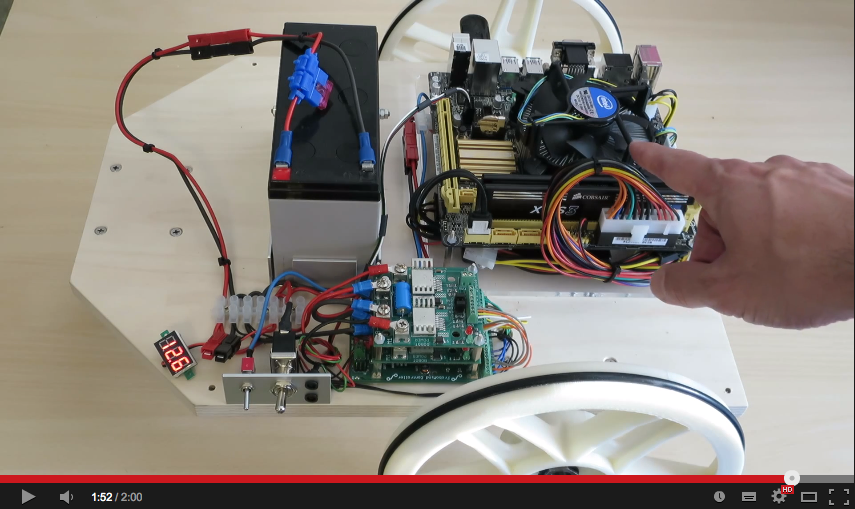
- Watch the FrobitPro robot parts introduction video.
- Watch the FrobitPro power on and off instruction video
- Make sure that you have a working version of FroboMind (Ubuntu 12.04, ROS Hydro) either by installing it on your computer or by downloading one of the virtual machine images. Please see the FroboMind section below for installation details.
Optional exercises before the lecture:
- Read this FroboMind paper.
- Take a look at ROS Courses.
Lecture contents:
- RSD course mobile robot tasks
- Project hardware
- The FrobitPro robot
- The tipping platform
- Camera, IMU and Lidar sensors
- MarkerLocator
- Introduction to FroboMind
- FroboMind RSD course application
- FroboMind simulation
- Creating your first FroboMind autonomous navigation component
- Interfacing to the Frobit
Week 43
Lecture contents:
- FroboMind perception wrt. waypoint navigation (MarkerLocator)
- FroboMind action wrt. waypoint navigation (MarkerLocator)
FroboMind
For the RSD course the FroboMind installation (Hydro) is used. Please read the important notes below which apply to the RSD course before following the FroboMind installation guide (Hydro).
RSD course installation notes
Forking the FroboMind-SDU repository
The FroboMind installation guide (Hydro) in the Setting up GitHub section gives instructions on forking the FroboLab/FroboMind.git repository. However for the RSD course the FroboMind-SDU/FroboMind.git repository should be used.
Git: Cloning your forked FroboMind-SDU repository
To clone your forked version of the FroboMind-SDU/FroboMind.git repository to your computer we recommend that you use the command below (i.e. omitting the --recursive option mentioned at the FroboMind installation guide (Hydro)).
cd ~/roswork git clone http://github.com/YourUserAccount/FroboMind.git src
Git: Finding the FroboMind RSD application
When you have installed FroboMind on your computer following the FroboMind installation guide (Hydro) you will find the RSD Application at:
~/roswork/src/fmApp/sdu/sdu_rsd_2014
To run the scripts in the sdu_rsd_2014/bin directory from anywhere, run:
echo 'PATH="$PATH:~/roswork/src/fmApp/sdu/sdu_rsd_2014/bin"' >> ~/.bashrc
To compile the FroboMind components needed for the sdu_rsd_2014 application, run:
frobomind_make /fmApp/sdu/sdu_rsd_2014
Simulation
Assuming that you made the above mentioned changes and additions to the FroboMind installation guide (Hydro) you can run the RSD simulator by running this command:
rsd_sim_wpt_nav
- The Stage simulator launches a map of RoboLab drawn to scale. The map shows the lego dispenser platform, the robot cells and the pillars supporting the balcony. Naturaly there are many more obstacles in RoboLab, and these may be added if needed. The map file is located at sdu_rsd_2014/stage/robolab_rsd.png and 1 pixel corresponds to 2 cm.

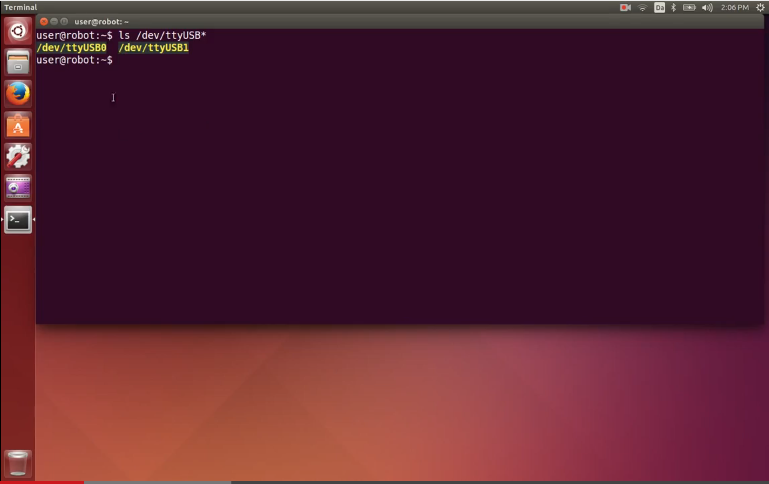
- A virtual lidar is located at the center of the robot. The lidar outputs scan messages using the topic /base_scan When the simulated robot moves about in the RoboLab environment the laser scan will reflect on any of the drawn obstacles, and the simulator may therefore be a valuable tool for the development of navigation and behaviour components for FroboMind.
Virtual Machines
Please read this section if you prefer to use a virtual machine rather than installing FroboMind on your computer.
- For the RSD course you can download a Virtual Machine with Ubuntu 12.04, ROS Hydro and FroboMind installed. It was created using VMware.
- This virtual machine contains a clone of http://github.com/FroboMind-SDU/FroboMind.git which you may want to change in order to use your own or your group's github fork of FroboMind. In case you want to continue with the current clone you should update it using the commands described above:
- As SDU students you should be able to download VMware for free from the SDU TECH's Software Download Center. By 2014-09-11 VMware Workstation 10 for Windows/Linux and Fusion 7.0 for OSX are available at the download center.
- ROS.org provides various virtual machines with Ubuntu and ROS preinstalled. You can download a with virtual machine with Ubuntu 12.04 and ROS Hydro installed. According to the webpage it complies with the Open Virtualization Format (OVF) and supports VirtualBox.
RSD Course notes about working with FroboMind
The guide on how to use git and github has migrated to a generic guide. Please find it here: How to use Git and GitHub with FroboMind.
The only thing you need to keep in mind is that you should use FroboMind-SDU/FroboMind.git rather than FroboLab/FroboMind.git as the original repository.
Mobile robot
For the RSD course the FrobitPro robot is used, please find the generic documentation for at this page. Some important notes about the application to the RSD course is listed below:

The FrobitPro robot.
Tipping platform
Assembly of the tipping platform is a task within the course. The parts for the tipping platform will be supplied by the facilitators. These are prototype parts and it is expected that minor problems may occur during assembly. Control of the stepper motor using some sort of embedded computer and h-bridge is part of the course curriculum as well.

A prototype of the tipping platform.
Charging
Battery voltage
Any battery showing a voltage of 12.0V or less while at rest should be disconnected and charged immediately. Please notice that the FrobitPro will not drive unless the voltage is 12.0V or above. A low voltage condition is indicated by 5 flashes of the FroboMind Controller LED.
PC
Modifications of the robot
Please notice that you are not allowed to make any modifications to the provided FrobitPro platform unless this has been approved by Kjeld.
Sensors
To use the FrobitPro robot for the RSD course you need to install a few sensors which are available through the SDU technical libaray. This means that one person from your group should loan these from the library using this procedure:
- When the group has decided who will loan these sensors, that student sends me a brief email about it.
- I notify the library and cc the student on that email.
- The student picks up the sensors.
- The group uses the sensors.
- The student consult me for approval of the sensors to be returned.
- I notify the library about the approval.
- The student returns the sensors to the library.
Please notice that the student loaning the sensors from the library will be responsible for the sensors during the RSD course. You can read more about how to use the sensors using these links.


MarkerLocator
The MarkerLocator was developed by Henrik Midtiby who will be presenting it at the mobile robot lectures Tuesday September 14, 2014.
Tasks
The tasks for the mobile robots are all listed in the document RSD description 2014.pdf which is available at Blackboard.